Practica #6: Two PZEM-014/016 AC Energy Meter
Repositorio:
Materiales:
- 1 PLC-LAB
- 2 ModulosPZEM016 (Link)
Requisitos previos:
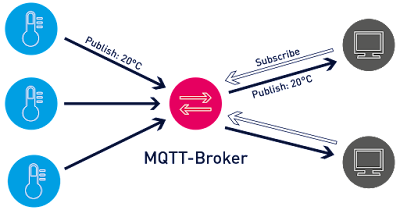
Modbus:
Una de las ventajas de usar Modbus con RS485 es la capacidad de conectar varios módulos en paralelo, y poder obtener medición de cada uno por separado. Esto es posible gracias al manejo de ID. La trama que se envía a los esclavos incluye un identificador con el cual se puede determinar cual de los equipos debe responder.

Cambio dirección Modulo PZEM016:
Estos módulos vienen de fabrica con la dirección 0x01, para poder utilizar mas de uno, se debe cambiar dicha dirección. Para ello debemos cargar el siguiente código al ESP32 con el modulo previamente conectado y energizado.
Código Principal:
Capturas:


Cambio dirección Modulo PZEM016:
Estos módulos vienen de fabrica con la dirección 0x01, para poder utilizar mas de uno, se debe cambiar dicha dirección. Para ello debemos cargar el siguiente código al ESP32 con el modulo previamente conectado y energizado.
Código Principal:
Capturas:


Comments
Post a Comment